Estudos sobre a mecânica da natação de águas-vivas (medusas) têm revelado informações importantes sobre a propulsão animal e servido de inspiração para engenheiros na construção de robôs aquáticos que mimetizam esses mecanismos. Em experimentos utilizando câmeras capazes de filmar em “super câmera lenta”, foram analisados padrões de natação de espécies de águas-vivas provenientes de diversas regiões do mundo, algumas delas registradas pela primeira vez (Fig. 1).
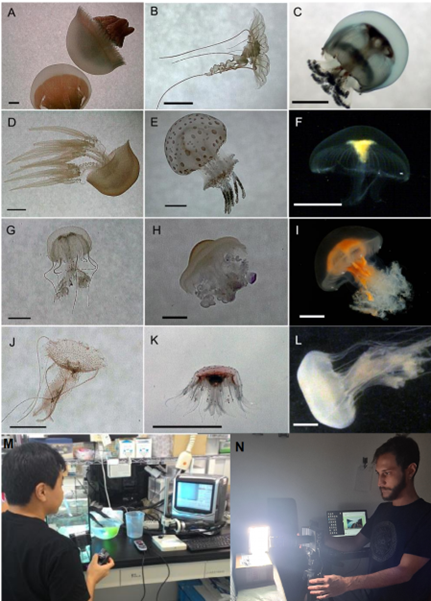
Figura 1 - Algumas das espécies registradas com a câmera de alta velocidade, filmadas a 1.000 quadros por segundo. A) Catostylus mosaicus, B) Cyanea capillata, C) Stomolohpus meleagris, D) Rhopilema esculentum, E) Mastigias sp., F) Aurelia sp., G) Chrysaora pacifica, H) Cotylorhiza tuberculata, I) Lychnorhiza lucerna, J) Sanderia malayensis. K) Chrysaora plocamia e L) Chrysaora lactea. Pesquisadores M) Renato M. Nagata e N) Guilherme M. von Montfort. As barras de escala são de 1 cm para A-G e 0,5 cm para H.
As medusas têm um corpo em formato de sino ou prato, semelhante a um guarda-chuva aberto, denominado umbrela (Fig. 2). Durante a natação, a pulsação faz com que a água se mova para dentro e para fora da umbrela, criando uma série de vórtices ou redemoinhos de água. Durante a contração, um "vórtice inicial" é formado ao redor da margem do corpo e canaliza a água para baixo. Em seguida, os músculos relaxam de maneira passiva, a umbrela retorna à sua forma aberta e relaxada, devido as fibras elásticas de seus corpos que armazenam a energia da contração, e a água preenche novamente a cavidade da umbrela. Nesse momento, um "vórtice de parada" é formado dentro do sino, com rotação oposta em relação ao vórtice inicial. Os vórtices de parada jogam água para dentro da cavidade da umbrela, aumentam a pressão e empurram o animal para frente. Devido à natureza passiva desse movimento, o processo é chamado de recaptura passiva de energia (PER), e isto torna a natação das águas-vivas o mecanismo propulsor mais eficiente (ou de menor gasto energético) entre todos os animais aquáticos.
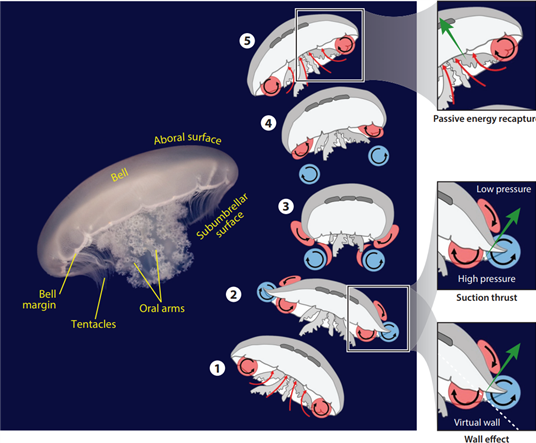
Figura 2 - Anatomia da medusa Aurelia spp. e interações dos vórtices que permitem a natação eficiente. As áreas vermelhas representam vórtices de parada e as áreas azuis, os vórtices iniciais. As setas pretas indicam a direção da circulação do fluido. As setas verdes representam a direção da contribuição de empuxo fornecida pelas diferentes interações dos vórtices. (alterado de Costello et al., 2021)
Nossa equipe distinguiu dois padrões de natação relacionados à história evolutiva de espécies de medusas da classe Scyphozoa (Cnidaria, Medusozoa) (Fig. 3): aquelas do grupo Rhizostomeae pulsam mais rapidamente (1,5 pulsações por segundo) comparadas às medusas de “Semaeostomeae” (0,6 pulsações por segundo).
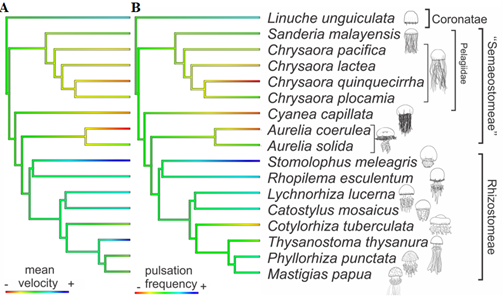
Figura 3 - Reconstruções de caráter ancestral estimadas a partir da cinemática da pulsação e desempenho de natação em medusas de cifozoários: A) velocidade média; B) frequência de pulsação. As cores quentes e frias na escala de cada variável representam valores mais altos e mais baixos, respectivamente.
Apesar das diferenças na frequência e velocidade, observamos que os dois grupos cobrem a mesma distância a cada pulsação. Qual seria então o significado das claras desigualdades no estilo de natação desses animais? Tudo indica que esteja relacionado às distintas estratégias de captura de alimento. As medusas de Rhizostomeae se alimentam capturando pequenos organismos planctônicos utilizando um processo de filtração, que ocorre ao nível dos braços orais – estruturas muito desenvolvidas que funcionam como uma espécie de peneira pegajosa. Quando uma medusa de Rhizostomeae pulsa, joga as pequenas presas presentes na água contra as estruturas de captura de alimento, de forma que a pulsação mais rápida permite que esses animais “filtrem” um grande volume de água enquanto nadam. As Semaeostomeae, embora também se alimentem de plâncton, geralmente capturam organismos maiores, incluindo peixes. Essas medusas pulsam mais pausadamente, de forma a aproveitar melhor os impulsos gerados pela pulsação – elas possuem os padrões de natação mais eficientes de todas as demais espécies de animais aquáticos, em termos de gastos energéticos! Dessa forma, os autores do estudo sugerem que espécies de “Semaeostomeae” da família Pelagiidae, como o gênero Chrysaora, representam os melhores modelos biomiméticos de propulsão animal, que podem inspirar a construção de veículos aquáticos não tripulados de baixo consumo energético. Estes veículos poderão operar futuramente em diversas missões, incluindo o monitoramento das condições dos oceanos, com capacidade para medir temperatura e salinidade, além de realizar registros e capturas de imagens subaquáticas (veja, por exemplo, Frame et al., 2018).
O trabalho contou com a colaboração de pesquisadores dos EUA (@mblwoodshole), do Japão (Kitasato University, School of Marine Biosciences) e do Brasil, da USP (@cebimar_usp), UFRGS, UNESP e da FURG. Imagens: Alvaro E. Migotto e Renato M. Nagata.
Leia o artigo completo:
von Montfort, G.M., Costello, J.H., Colin, S.P., Morandini, A.C., Migotto, A. E., Maronna, M.M., Reginato, M., Miyake, H. & Nagata, R.M. Ontogenetic transitions, biomechanical trade-offs and macroevolution of scyphozoan medusae swimming patterns. Scientific Reports 13, 9760 (2023). https://doi.org/10.1038/s41598-023-34927-w
Saiba mais:
Costello, J. H., Colin, S. P., Dabiri, J. O., Gemmell, B. J., Lucas, K. N., & Sutherland, K. R. (2021). The hydrodynamics of jellyfish swimming. Annual Review of Marine Science, 13, 375-396. https://doi.org/10.1146/annurev-marine-031120-091442
Frame, J., Lopez, N., Curet, O., & Engeberg, E. D. (2018). Thrust force characterization of free-swimming soft robotic jellyfish. Bioinspiration & biomimetics, 13(6), 064001. https://10.0.4.64/1748-3190/aadcb3
Wodinsky, Shoshana . This robotic jellyfish could help save our reefs from climate change. NBC News Oct 1 2018. Disponível em: https://www.nbcnews.com/mach/science/robotic-jellyfish-could-help-save-our-reefs-climate-change-ncna913111.
Guilherme M. von Montfort, doutorando pelo programa de pós-graduação em oceanografia biológica da FURG. Desenvolve sua pesquisa com zooplâncton marinho, com ênfase na ecologia trófica e sua integração com a biomecânica do zooplâncton gelatinoso. Possui experiência em instrumentação oceanográfica e coleta de dados em campanhas oceanográficas. Tem interesse no cultivo de organismos aquáticos e na área de tecnologia com análise de dados.
Renato M. Nagata, cientista e professor do Instituto de Oceanografia da Universidade Federal do Rio Grande (FURG), atuando no Núcleo de Oceanografia Biológica e no Laboratório de Zooplâncton. Desenvolve projetos em zooplâncton marinho, com ênfase em biologia do zooplâncton gelatinoso e cnidários planctônicos. Interesse de pesquisa em ecologia e biomecânica do plâncton, blooms de medusas, morfologia funcional, dinâmica populacional, surtos de acidentes com medusas tóxicas, e ecologia trófica.